
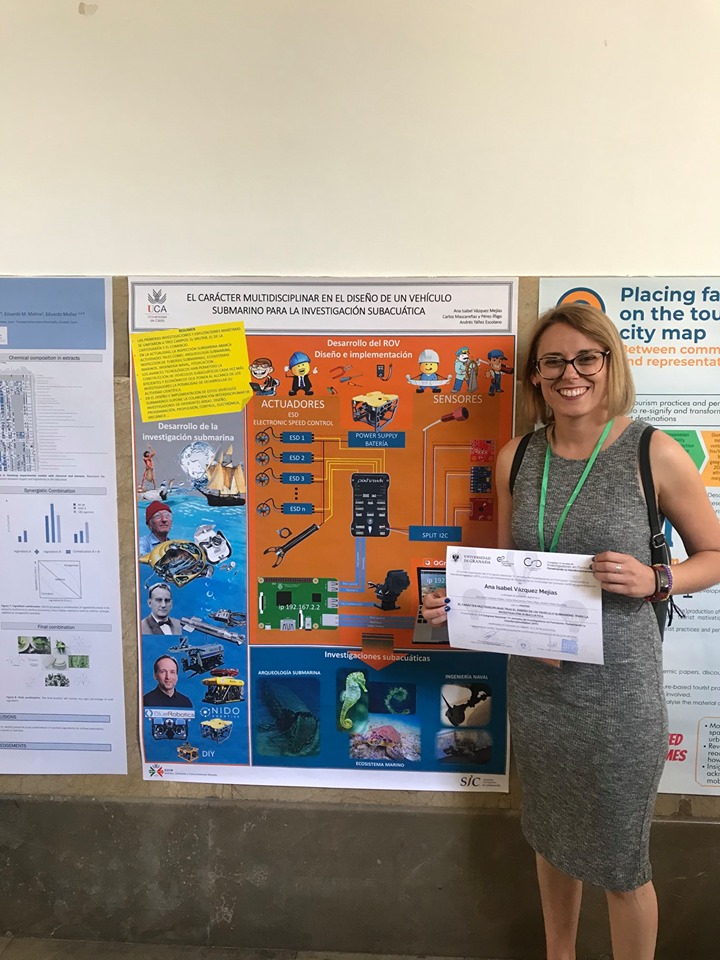
Llegar y triunfar. Primera vez que acude a las JIFFI y premio al mejor póster de la cuarta edición de las jornadas. Os presentamos a Ana Isabel Vázquez Mejías de la Universidad de Cádiz. ¡Vamos a conocerla!
¿Qué te impulsó a apuntarte a las JIFFI y cómo definirías tu experiencia en esta cuarta edición?
Primero porque me enteré a través de la escuela de doctorado de UCA EDUCA y en principio las horas que me contabilizaría para el doctorado, la próxima por la experiencia tan agradable que he tenido. En cuanto a la experiencia, ha sido muy buena y si puedo repetiré y si no puedo (no será por falta de ganas), lo recomendaré a todo el que pueda.
¿Cómo te inspiraste para realizar dicho póster?
En la información de la web JIFFI se hace especial hincapié en la divulgación y multicisciplinaridad, por lo que al encontrarme inmersa en el desarrollo del vehículo submarino, con un grupo de investigadores de diferentes campos, lo vi ideal para su divulgación y que gente interesada en el desarrollo del vehículo, pero principalmente en su posibles aplicaciones, supiesen de nuestro trabajo
¿Qué herramienta utilizaste para realizar el diseño? ¿Qué recomendaciones le darías a una persona a la hora de realizar un póster científico?
La plantilla o base es un Power Point, pero las imágenes están pretratadas con el software de tratamiento de imágenes GIMP. Primero conocer el contexto donde lo va a presentar y ser consecuentes con el congreso, en este caso lo importante era que la gente interesada en el mundo submarino, por investigaciones que realicen en este medio sepan y vean fácilmente esta herramienta.
Háblanos sobre tu experiencia en el Programa de Doctorado.
Mi experiencia con el doctorado es buena y mala.
Buena por las personas con las que trabajo, como expliqué en el congreso me encuentro rodeada de un equipo interdisciplinar, que además de profesores y alumnos, son compañeros con los que sacar este proyecto adelante y gracias a este proyecto, nos ayudamos entre nosotros e intentamos beneficiarnos entre todos, cada uno con sus intereses, pero siempre con una meta en común.
La parte negativa es la “burocracia” del Doctorado, principalmente la famosa y temida publicación en una revista de impacto, en mi caso debe estar indexada en JCR (WOS) y si es Q1 mejor. Este método para validar y calificar las tesis, bajo mi punto de vista, es totalmente injusto, no se debería ver la calidad de un artículo y en consecuencia de la tesis, por la calidad de la revista en la que publicas, puedes publicar un artículo muy malo en una de las “grandes” si tienes padrino o al contrario tener un artículo de una investigación muy bueno, que no te lo admiten en estas revistas porque no te conocen. En la Universidad de Cádiz se sigue estas directrices, en otras áreas en vez de WOS deben ser SJR (SCOPUS), que viene a ser lo mismo.
¿Cuál es el tema de tu tesis doctoral?
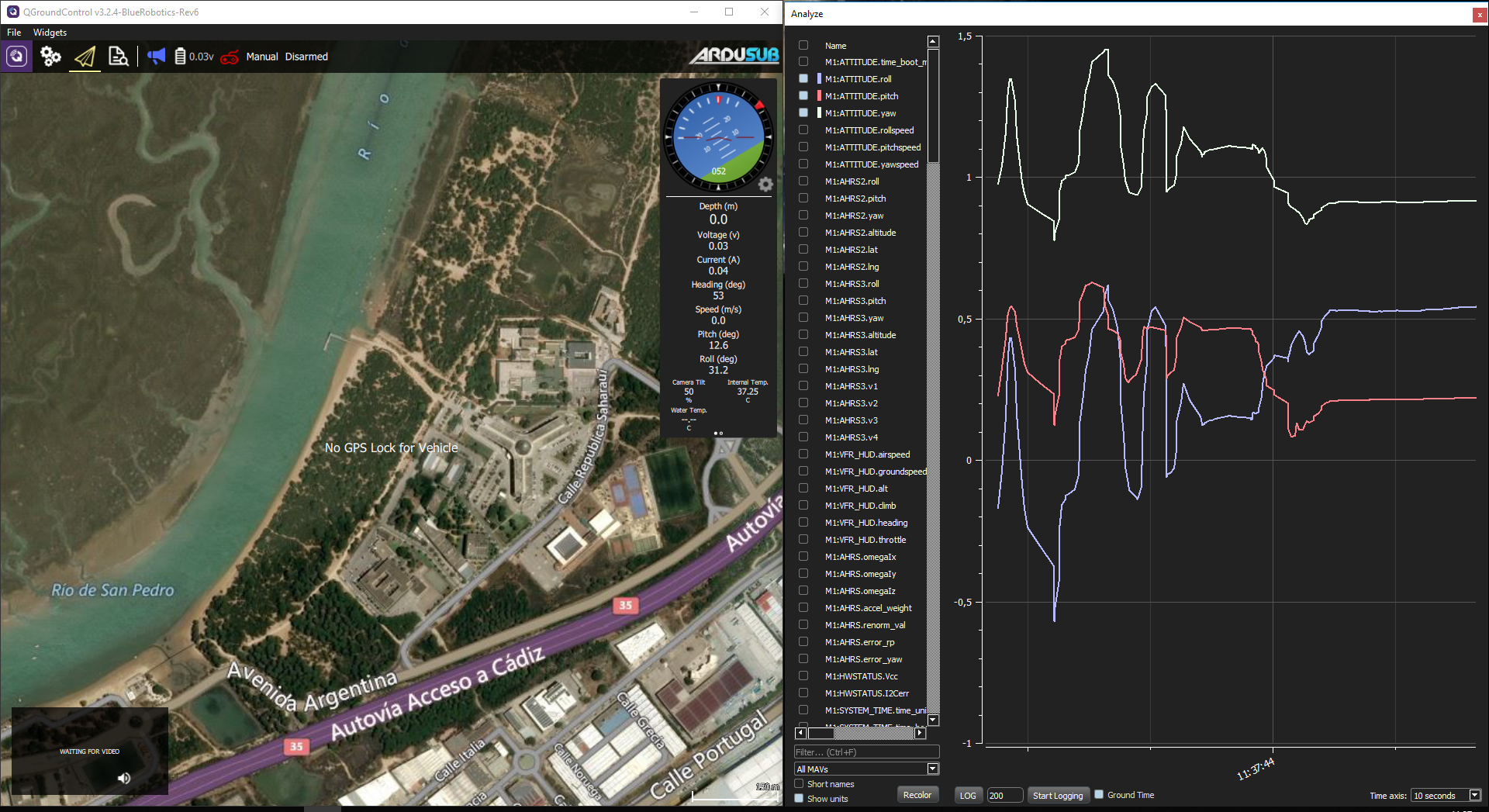
Mi tesis, sólo está enfocada en una parte del desarrollo del vehículo submarino, en el sistema de posicionamiento, en concreto sistema de posicionamiento dinámico con la utilización de diferentes tipos de sensores, en principio: acelerómetros, giróscopos y magenetómetros.
¿Por qué es necesario el desarrollo de un vehículo submarino de bajo coste y accesible?
Desde las primeras incursiones submarinas, las más conocidas las del divulgador francés Jacques Yves Cousteau, que gracias al desarrollo de su minisubmarino la Scoupe Plongeante, permitió el acceso al ser humano por debajo de los cien metros de profundidad, él nos acercó a todos con sus documentales el fascinante mundo submarino. En la actualidad las investigaciones y explotación submarinos son muchísimas, por ejemplo: estudio de ecosistemas marinos, arqueología submarina, construcción naval, búsqueda de cadáveres, inspección de tuberías… Todos estos campos y muchos otros requieren del desarrollo y tecnología, capaz de trabajar en este entorno, la robótica submarina.
La accesibilidad a este tipo de robots o vehículos es costosa y por lo tanto el desarrollo de un sistema flexible, económico y accesible, para investigadores del mundo submarino es de gran utilidad. Actualmente existen varias alternativas con diferentes costes.
¿En qué año de doctorado y fase del proyecto te encuentras?
Me encuentro en el segundo año de doctorado y estamos empezando, con las tomas de datos en laboratorio, de los sensores bajo estudio. Mi tesis está enfocada al diseño e implementación de un sistema de control de posicionamiento dinámico de bajo coste.
Cuando hablamos de posicionamiento dinámico, la mayoría de personas piensan en la posición en latitud y longitud o sobre un plano x|y, pero en realidad un sistema de posicionamiento dinámico comprende todo lo necesario para mantener el vehículo en una posición exacta. Los sistemas de localización submarinas se ven afectados por la falta de referencia de navegación tradicionales, dejándolo casi en exclusiva, al uso de sensores inerciales. Para ello dotamos al vehículo de sensores que nos describen el movimiento del mismo y corrige su posición manteniendo su posición dinámicamente. Cuando se consiga este hito, el siguiente paso será integrar los valores de sensores para obtener la localización en latitud, longitud y profundidad.
Todo el proyecto en general (construcción de ROV de bajo coste) y en concreto mi tesis (métodos de posicionamiento dinámico) está enfocada al desarrollo de un sistema de posicionamiento destinado a vehículos submarinos OSH (Open-Source Hardware) y OSS (Open-Source Software).
Finalmente, ¿qué diferencias has encontrado entre este congreso y otros que has asistido anteriormente?
Es más fácil decir lo que os parecéis a otros, en que se llaman congresos, no os parecéis en nada a los que he ido y creedme que eso es bueno, aunque los otros se hagan pasar por serios he ido y tendré que seguir yendo por las horas que se obligan a cumplir en el programa de doctorado, al vuestro volveré si puedo, PORQUE ME DA LA GANA.
Muchas gracias por tus palabras Ana Isabel. Y por supuesto te esperamos a ti y a todas esas personas que vas a invitar en las próximas JIFFI.